エンドエフェクタとは?

多関節ロボットや、スカラロボットなどのアーム先端に取り付けられ、掴んだり、持ち上げたり、突いて姿勢を変えたり、潰したり、ねじを締めたり、溶接したり、対象ワークに作用を及ぼす機器をエンドエフェクタと言います。
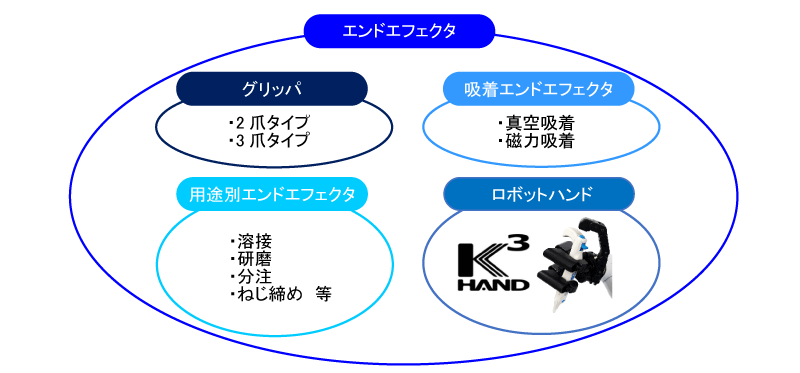
一口にエンドエフェクタと言っても、世の中には、様々なエンドエフェクタが存在し、実際に行う作業(タスク)、対象ワークの重さ、形状、硬さ、材質によって、グリッパ(2爪タイプ、3爪タイプ)、吸着エンドエフェクタ(真空吸着、磁力吸着)、用途別エンドエフェクタ(溶接、研磨、分注、ねじ締め)などが適宜選定されます。また、その動力も、インフラ環境に応じて、電動、エア駆動(圧縮・真空)、油圧駆動などさまざまです。
通常、決められた作業(タスク)に応じて、そのタスクに適した「専用」のエンドエフェクタが選定されるのが一般的ですが、近年では、マルチタスク、多能工と言った、一つのロボットシステムでさまざまなタスクを行う取り組みが進められています。
エンドエフェクタのロボットハンド
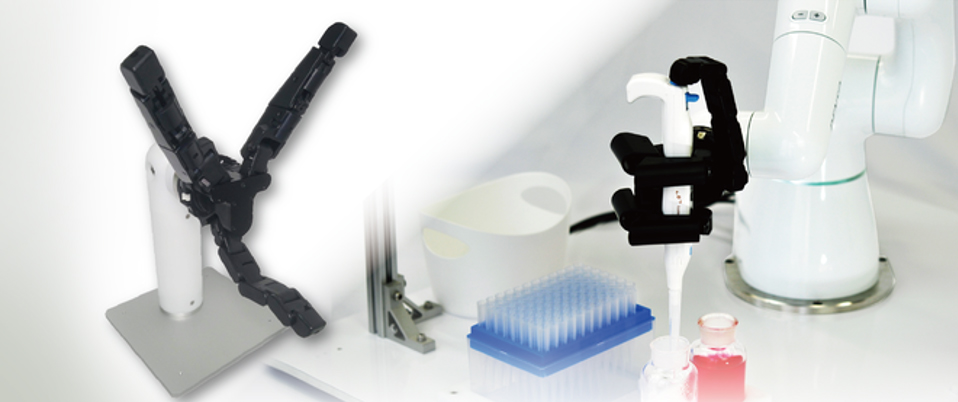
そこで力を発揮するのが、ロボットハンド(汎用ハンド)です。名前の通り、一つの作業(タスク)だけではなく、いくつものタスクをこなせるエンドエフェクタです。つまり、ロボットハンドは、エンドエフェクタのひとつと言えます。Orbrayでも、2019年6月に、このロボットハンドK3ハンドをリリースしました。
K3ハンドは、器用・小型/軽量が特徴のロボットハンドで、「把持」と「操作」の両立など、さまざまなタスクを、一つのハンドで行えます。またK3ハンドは、指先が交換でき、先が細いもの、へら状のもの、弾性を有するもの、ギザギザ形状で滑りにくく加工されたものなどを取り付けることにより、さらにその適用範囲が拡がります。エンドエフェクタは、ロボットシステムの機能を左右する、とても重要な要素と言えます。
Orbrayは、エンドエフェクタ、ロボットハンドで、器用なロボットに貢献いたします。

お問い合せは下記フォームに入力し、確認ボタンを押して下さい。
※お問い合わせフォームからのセールス等はお断りいたします。送信いただいても対応いたしかねます。